Sakari Tuominen  ,
Annika Kangas
,
Annika Kangas
Miehittämättömät lentolaitteet metsien kaukokartoituksessa
Tuominen S., Kangas A. (2018). Miehittämättömät lentolaitteet metsien kaukokartoituksessa. Metsätieteen aikakauskirja vuosikerta 2018 artikkeli 10085. https://doi.org/10.14214/ma.10085
-
Tuominen,
Luonnonvarakeskus (Luke), Biotalous ja ympäristö, Helsinki
Sähköposti
sakari.tuominen@luke.fi
- Kangas, Luonnonvarakeskus (Luke), Biotalous ja ympäristö, Joensuu Sähköposti annika.kangas@luke.fi
Vastaanotettu 23.11.2018 Hyväksytty 28.11.2018 Julkaistu 30.11.2018
Katselukerrat 16513
Saatavilla https://doi.org/10.14214/ma.10085 | Lataa PDF

Miehittämättömät lentolaitteet, jotka yleisesti tunnetaan vastaavan englanninkielisen termin lyhenteellä UAV (Unmanned Aerial Vehicle), ovat luonnonvarojen kartoituksen alalla laajan kiinnostuksen kohteena. Asiaan liittyy lisäksi myös jonkinlaista hypeä alan palveluja tarjoavien toimijoiden ja muiden tekniikasta kiinnostuneiden taholta. UAV-tekniikan on esitetty tarjoavan mahdollisuuden hyvin tarkkaan puustotunnusten inventointiin, ja testiolosuhteissa onkin saavutettu erittäin hyviä tuloksia puustoarvioinnin tarkkuudessa. Samanlaisiin tuloksiin pääseminen laajan alueen käytännön inventoinnissa ei ole nykyhetkellä kuitenkaan täysin realistista.
UAV:illa on kuitenkin merkittäviä etuja. Keveiden ja edullisten lentolaitteiden saatavuus on tietyssä mielessä demokratisoinut kaukokartoitusmenetelmien käytön niin, että verrattuna aikaan ennen UAV:ita paljon useammilla toimijoilla on mahdollisuus toteuttaa ilmakuvauksia.
Miehittämättömien lentolaitteiden päätyypit
Keveimmät ilmakuvauksessa käytettävät UAV:t ovat yleensä sähkökäyttöisiä multikopterityyppisiä lentolaitteita. Valikoiman keveimmässä päässä ovat 3–4 roottoriset, puhtaasti harrastuskäyttöön tarkoitetut lentolaitteet, jotka voidaan varustaa kompaktilla digitaalikameralla. Jakauman toisessa päässä ovat ammattikäyttöön tarkoitetut 6–8 roottoriset laitteet, jotka voivat kantaa yli 10 kilogramman kuorman. Multikopterit ovat lentopaikan valinnan suhteen hyvin joustavia, niitä voidaan lennättää lähes mistä tahansa aukeasta paikasta. Myös niiden sensorikuorman kantokyky on lentolaitteen kokoon nähden hyvä. Tällaiset laitteet ovat tyypillisiä erilaisten urheilutapahtumien samoin kuin luontodokumenttien kuvaamisessa ilmasta. Haittapuolena niillä on lyhyt toiminta-aika akkukapasiteetin rajallisuuden takia. Raskaammilla, konventionaalista helikopteria vastaavilla UAV:illa (pääroottori + pyrstöroottori), joiden voimanlähteenä käytetään polttomoottoria, voidaan saavuttaa pitempi toimintamatka samalla säilyttäen joustavuus lentopaikan valinnan suhteen.
Kiinteäsiipisillä lentolaitteilla kokovalikoima on vieläkin laajempi, lähtien käsivaralta ilmaan laukaistavista pienistä sähkökäyttöisistä lennokeista, ja päätyen konventionaalisten lentokoneiden kokoisiin, yleensä sotilas- ja valvontakäyttöön suunniteltuihin laitteisiin. Metsien kaukokartoituksessa käyttökelpoisien laitteiden vaatimuksena voidaan pitää vähintään muutaman kilon kuormanottokykyä, sekä riittävän pitkää toiminta-aikaa (>60 min). Metsäkuvauksissa käyttökelpoiseksi havaittu toimintatapa on esim. lentoonlähtö katapultilta sekä laskeutuminen varjon varassa (ks. Kuva 1), jolloin vaatimukset täyttävien lentopaikkojen löytäminen on edelleen helppoa. Suurten, konventionaalisen lentokoneen kokoisten laitteiden lennätys vaatii myös samanlaista lentokenttäinfrastruktuuria kuin lentokoneilla lentäminen.

Kuva 1. Katapultilta laukaistava ja varjon varassa laskeutuva UAV (esimerkkinä C-Astral Bramor).
Metsäkuvauksissa käytettävät sensorit ja laitteet
Kevyiden UAV:iden kantokyky riittää lähinnä erilaisten optisten kamerasensoreiden käyttämiseen, mutta esim. multikoptereita on myös varta vasten suunniteltu laserkeilaimen kantamiseen. Suuremmat lentolaitteet voidaan tarvittaessa varustaa samanlaisella sensorivarustuksella kuin lentokoneetkin, esimerkiksi laajaformaattisella ilmakuvauskameralla.
Kaukokartoitustarkoituksessa lentäminen edellyttää lentolaitteen varustamista autopilotilla ja GPS+IMU (inertiamittauslaite) -laitteistolla, jotta suunnitellut lentolinjat voidaan lentää tarkasti, eikä mittauksiin jää aukkoja. Järjestelmään kuuluu lisäksi maa-asema, jolla lentolaitteelle syötetään lentosuunnitelma, sekä lennon aikana seurataan lentolaitteen telemetriatietoja kuten nopeus, sijainti, akun varaus ja sensorien toiminta.
UAV:llä tuotettava kaukokartoitusaineisto
Tyypillinen kaukokartoitusaineisto on optisella kamerasensorilla otetuista kuvista tuotettu RGB-, vääräväri- tai hyperspektrialueen ortokuvamosaiikki. Hyperspektrikanavien määrä voi olla joistakin kymmenistä satoihin kanaviin. Toinen tyypillinen UAV-kuvauksella tuotettava aineisto on digitaaliseen stereofotogrammetriaan perustuva 3D-pistepilvi (Kuva 2), jollainen voidaan tuottaa hyvin yksinkertaisella kamerasensorilla otetuista kuvista edellyttäen, että kuvien resoluutio ja stereopeitto on riittävä. Hyperspektrikuvauksen korkea spektrinen ja radiometrinen erotuskyky toteutuu jossain määrin spatiaalisen erotuskyvyn kustannuksella. Tästä syystä 3D-pistepilven tuottamiseen käytetään yleensä RGB-kameraa. Laserkeilainta käyttämällä voidaan tuottaa lidar-pistepilvi, jonka erotuskyky riippuu lähinnä lentokorkeudesta (Kuva 3).

Kuva 2. UAV-kuvauksesta tuotettu stereofotogrammetrinen 3D-malli metsästä.
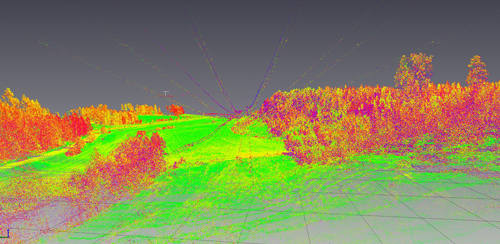
Kuva 3. UAV:sta noin 70 m:n korkeudelta keilattu laserpistepilvi, laitteena Riegl RiCopter/VUX-SYS laserkeilainjärjestelmä, © Nordic Geo Center Oy. Pisteiden väritys säädetty eri kohteista heijastuneiden kaikujen intensiteetin perusteella.
UAV:n avulla tuotetun stereofotogrammetrisen 3D-pistepilven ja hyperspektrikuvan yhdistelmällä on päästy puustotulkinnassa koealatasolla hyvin tarkkoihin estimaatteihin puuston määrää ja dimensiota samoin kuin eri puulajien osuuksia kuvaavien tunnusten osalta. UAV:n suhteellisen matalasta lentokorkeudesta johtuen kuvaus voidaan tehdä korkealla resoluutiolla, alkaen muutamasta senttimetristä. Yhdistettynä riittävän suureen stereopeittoon kuvaus tuottaa hyvin yksityiskohtaisen fotogrammetrisen pintamallin metsästä (Kuva 2). Autopilotin ja GPS-IMU:n yhdistelmä mahdollistaa hyvin tarkan lentämisen, jolloin minkä tahansa muotoinen kuvausalue voidaan kattaa ongelmitta.
Aluetason puustotulkinnassa, jossa puustotulkintayksikkönä on yleensä koeala tai mikrokuvio, on fotogrammetrisen 3D-pistepilven ja hyperspektriaineiston yhdistelmällä päästy Suomen olosuhteissa noin 7 %:n estimointitarkkuuteen (RMSE) puuston pituuden suhteen ja hieman yli 20 %:n tarkkuuteen puuston kokonaistilavuuden suhteen. Samanlaisella aineistolla on saatu laajasta puulajivalikoimasta (kuvattu Mustilan arboretumissa Elimäellä) tunnistettua yksittäisten puiden tasolla puulaji hyvin luotettavasti, 83 %:n tarkkuudella 26 puulajin joukosta. Vastaavanlainen kuvausaineisto mahdollistaa metsäninventoinnin lisäksi esim. fotorealistisen 3D-virtuaaliesityksen metsästä.
UAV:n etuja ja rajoituksia metsäkuvauksissa
Merkittävimpänä etuna voidaan ilman muuta pitää kevyiden ja edullisten lentolaitteiden mahdollistamia alhaisia lentokustannuksia ja matalaa kynnystä lentotoiminnan aloittamiseen. Hyvin tarkasti säädeltyyn perinteiseen ilmailuun verrattuna UAV-operointiin liittyy melko vähän hallinnollista ja juridista säätelyä, mutta toisaalta UAV-lentämiseen liittyy sellaisia rajoituksia, jotka merkittävästi haittaavat kaukokartoitustoimintaa.
Kun toiminta ei ole sidottu konventionaalisen ilmailun vaatimiin lentokenttiin, lentotoiminta voidaan toteuttaa joustavasti kohteen lähistöltä. Tällöin lentojen ajoitus voidaan optimoida tarpeen mukaan, samoin kun on myös mahdollista reagoida nopeasti mahdollisesti kohdealueella muuttuviin sää- tai valaistusolosuhteisiin parhaan kuvaustuloksen saamiseksi. Vaikka kuvaus tai keilaus yleensä pyritään toteuttamaan mahdollisimman hyvissä valaistus- ja sääolosuhteissa, UAV:llä on mahdollista tehdä lennot myös pilviverhon alla. Sähkökäyttöiset UAV:t mahdollistavat myös lähes äänettömän toiminnan.
Mikäli kartoitus vaatii lentämistä vaikeissa olosuhteissa, voidaan UAV:llä lentäminen katsoa järkeväksi silloinkin, kun olosuhteet miehitetyn lentokoneen suhteen olisivat liian vaikeat tai vaaralliset. Tällainen tilanne voisi olla esimerkiksi talvisen myrskyn aiheuttamien metsätuhojen kiireellinen kartoitus joulukuun sumuisten ja lyhyiden päivien aikana. Lentämistä eivät myöskään rajoita lentomiehistön taukojen tarve tai työaikarajoitukset.
Merkittävänä etuna voidaan pitää myös sitä, että mahdollisen onnettomuuden, kuten maahan putoamisen, sattuessa vahinko on suurella todennäköisyydellä pelkästään materiaalinen ja kevyillä laitteilla silloinkin yleensä vähäinen.
Teknisiä rajoitteita merkittävämpänä esteenä UAV:iden käytön laajenemiselle metsäsektorilla ovat ilmailuhallinnolliset määräykset. Miehittämättömän ilmailun lainsäädännöllinen toimintakenttä asettaa rajoituksia, jotka paljolti estävät UAV-laitteiden teknisen potentiaalin täyden hyödyntämisen metsien kaukokartoituksessa. Suomessa, kuten useimmissa maissa, miehittämätön lennätys on pääsääntöisesti sallittu vain siten, että maa-asemalta on näköyhteys lentolaitteeseen ja tällöinkin suurin sallittu lentokorkeus on 150 metriä, minkä johdosta UAV on käyttökelpoinen vain pienien testialueiden tai muiden erikoiskohteiden kuvauksessa ilman lisäjärjestelyitä. Mainituista rajoituksista on kuitenkin mahdollista poiketa käyttämällä varattua (ts. muulta liikenteeltä suljettua) ilmatilaa, mikä sallii autonomisen lentämisen ohjelmoitua lentoreittiä pitkin ilman näköyhteyttä, siis pelkän autopilotin ja paikantimen ohjauksessa. Mikäli laite käy autonomisen lennon aikana radiohorisontin alapuolella, ei tällöin myöskään saada lennon telemetriatietoja maa-asemalle, eikä laitteelle voi tänä aikana lähettää mitään ohjauskomentoja kesken lennon. Ilmatilan varauksessa on omat byrokraattiset kiemuransa, mutta tällä hetkellä se on käytännössä ainoa keino saada tehokkaasti toteutettua minkään laajemman metsäalueen kartoitus UAV:llä.
Miten UAV:n potentiaalia voisi hyödyntää paremmin metsien kartoituksessa?
Jotta miehittämättömien lentolaitteiden edut tulisivat esiin, niillä olisi päästävä lentämään autonomisesti kuvattavalla alueella. Tämä vaatii sellaisten järjestelmien kehittämistä, mikä estäisi törmäykset muiden ilma-alusten kanssa. Hyvin kevyillä laitteilla törmäyksenesto-automatiikalle asetettavista vaatimuksista voisi mahdollisesti tinkiä. Pienten laitteiden osalta akkujen kapasiteetin paraneminen olisi myös tärkeää, mutta akkujen tekniikassa ei liene odotettavissa dramaattisia kehityshyppäyksiä lähitulevaisuudessa. Lisäksi ongelmaksi jää vakiintuneiden toimijoiden vähäisyys tällä hetkellä, varsinkaan suurilla UAV:illä tehtävää kartoitusta tarjoavia yrityksiä ei juuri ole. Suomessa metsäsuunnittelun vaatiman inventointitiedon keräämiseksi on yhteiskunnan rahoituksella ylläpidetty laserkeilaukseen ja ilmakuvaukseen perustuvaa metsien kaukokartoitusta, joten metsäalalla ei ole laajan mittakaavan UAV-yritystoiminnalle sopivaa taloudellista lokeroa. Koska metsäalalla ei ole syntynyt vakiintunutta UAV-toimintaa, on myöskin vaikea arvioida, mille hehtaarikustannustasolle UAV-kuvaukseen perustuva menetelmä asettuisi.
Huolimatta siitä, että UAV:llä itse lentäminen sinänsä onkin edullista miehitettyyn lentokoneeseen verrattuna, lentotoiminta kuitenkin sitoo henkilöstöä toiminta-alueella, eli UAV-kuvauksen päiväkustannuksista huomattava osa muodostuu henkilöstön palkka- ja matkakuluista. Kuvattavan pinta-alan päivätuotoksesta voidaan tehdä arvioita lentolaitteiden teknisten ominaisuuksien (kuten toiminta-ajan tai -matkan) perusteella. Vaikka laitteiden kehittyessä toiminta-ajat pitenevät, pitkillä kuvauslennoilla rajoitteeksi saattaa muodostua muita tekijöitä, kuten esim. kuvien tallennuskapasiteetti aineiston suuresta määrästä johtuen.
Teknisesti tälläkin hetkellä olisi täysin mahdollista kartoittaa koko Suomen metsät käyttäen halpoja verkkokaupoista tilattavissa olevia multikopterin ja kameran yhdistelmiä, mutta sellainen projekti ei olisi taloudellisessa mielessä tai organisoinnin kannalta toteuttamiskelpoinen. Pienten UAV-laitteiden potentiaalin hyödyntäminen laajan alueen kartoituksessa edellyttäisi suuria edistysaskeleita lentävien robottien autonomian ja parviälyn kehittämisessä. UAV-tekniikka tulee kuitenkin todennäköisesti ennemmin tai myöhemmin lyömään itsensä läpi metsien samoin kuin muidenkin luonnonvarojen kaukokartoituksessa, samalla tavoin kuin esim. matkapuhelimet viestinnässä. Ja kun tekniikka yleistyy, niillekin keksitään lisää uusia käyttötapoja, jotka poikkeavat nykyisistä kuvaustekniikoista. Ensimmäiseksi ne todennäköisimmin lyövät itsensä läpi siellä, missä ei ole olemassa yhteiskunnan tai muiden vakiintuneiden toimijoiden ylläpitämää valmista infrastruktuuria luonnonvarojen kartoituksessa.
Kirjallisuutta
Tuominen S., Balazs A., Honkavaara E., Pölönen I., Saari H., Hakala T., Viljanen N. (2017). Hyperspectral UAV-imagery and photogrammetric canopy height model in estimating forest stand variables. Silva Fennica 51(5) article 7721. https://doi.org/10.14214/sf.7721.
Tuominen S., Näsi R.,Honkavaara E., Balazs A., Hakala T., Viljanen N., Pölönen I., Saari H., Ojanen H. (2018). Assessment of classifiers and remote sensing features of hyperspectral imagery and stereo-photogrammetric point clouds for recognition of tree species in a forest area of high species diversity. Remote Sensing 10(5): 714. 28 s. https://doi.org/10.3390/rs10050714.
